“The spatial resolution combined with the enormous coverage are truly novel and were not possible previously,” claimed team member Professor Kaspar Althoefer (pictured), director of the Centre of Excellence Advanced Robotics at Queen Mary University, London. “Perception algorithms significantly improve on existing approaches to better interpret the interaction with the environment, allowing for a superior understanding of the grasped object and its crucial parameters.”
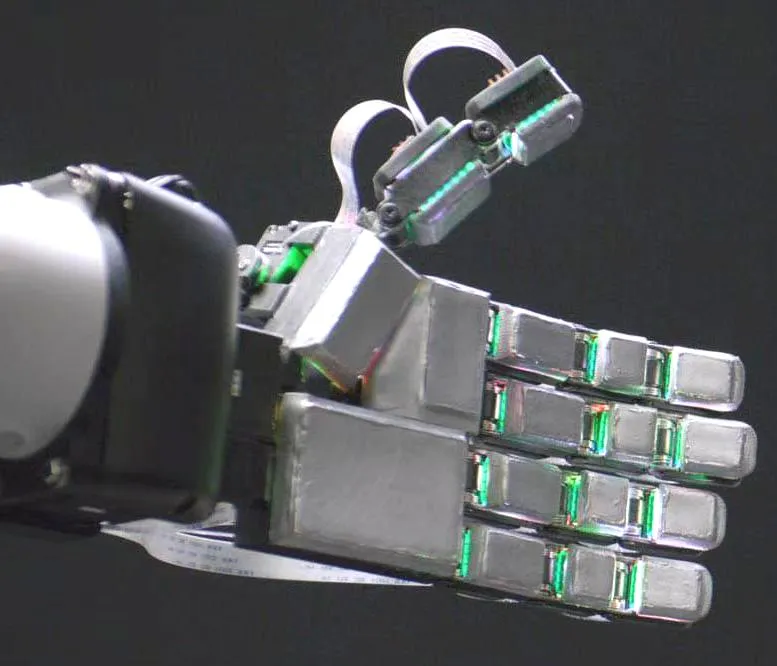
17 boxes of various shapes and sizes make up the hand: 14 representing the short bones in the fingers and thumb, and three representing the hand.
There are connected by hinged joints, spring-loaded to keep the hand open, and closed by a number of embedded miniature servos, five of which actuate multiple joints by pulling on thin wires that snake through the fingers and thumb.
To sense touch, the grasping face of each box is made from elastomer, and its distortions are observed from the inside by a tiny camera mounted on the box’ opposite face – so 17 cameras in total, each with its own RGBW illuminating LEDs.
A generative algorithm has been trained to move the servos in response to touch feedback from the cameras.
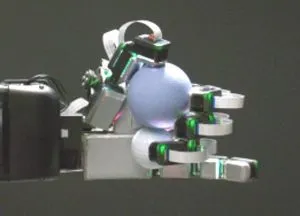
“The F-Tac Hand’s design overcomes traditional challenges associated with integrating high-resolution tactile sensors while preserving the hand’s range of motion,” according to the university. “Evaluation across 600 real-world trials showed that this tactile-embodied system significantly outperforms non-tactile-informed alternatives in complex manipulation tasks.”
The camera-based sensing technique originated at Queen Mary several years ago by Althoefer and PhD Student Wanlin Li.
Li is now at the Beijing Institute for General Artificial Intelligence, and the bulk of the research behind this generation of hand was done at Beijing Institute and Peking University.
The paper ‘Embedding high-resolution touch across robotic hands enables adaptive human-like grasping‘, published in Nature Machine Intelligence, carries a full description of the touch sensing technique and associated algorithms. This can be read in full without payment, and its supplementary information describes the mechanics of the hand.



