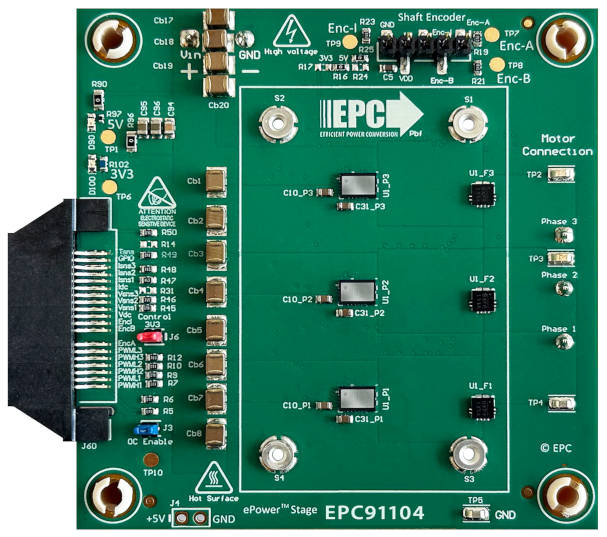
Measuring 72 x 75mm and operating across 14 to 80V with peaks up to 20A, it implements only the power stage, needing a separate signal generator board to work, as well as heatsinking.
The company offers four suitable companion control boards, based around Microchip’s dsPIC33EP, Texas Instruments’ TMS320F, ST Microelectronics’ STM32 or Renesas’ RA6T2 processors.
“This design is ideal for powering compact, precision motors in humanoid robots, such as those used for wrist, finger, and toe movements,” claimed EPC.
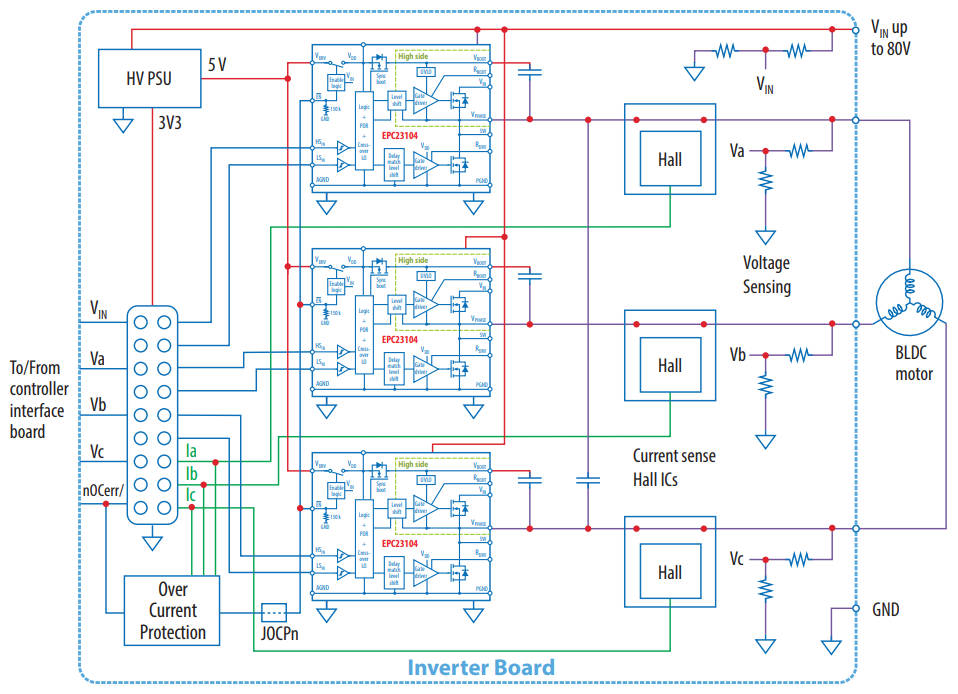 Most of the active circuitry is in three of the company’s EPC23104 half-bridge modules, which include GaN hemts and level-shifting drivers.
Most of the active circuitry is in three of the company’s EPC23104 half-bridge modules, which include GaN hemts and level-shifting drivers.
Sensorless and shaft-encoder operation is possible, and in the default configuration the board implements sensor-less field-orientated control over a M-3411P-LN-08D NEMA 34 motor from Teknic using space vector pulse-width modulation.
If torque requirements extend to humanoid robot knees, the company has an alternative design: EPC9176.
Find the EPC91104 web page here



Hey! Do you know if they make any plugins to safeguard against hackers?
I’m kinda paranoid about losing everything I’ve
worked hard on. Any recommendations?