
At this year’s Embedded World Europe, the OpenHW Group and the Eclipse Foundation confirmed their joint intention to develop a robust ecosystem for development tools, using Eclipse integrated development environments (IDE). OpenHW’s Rick O’Conor and Eclipse’s Mike Milinkovich also delivered an update on the software defined vehicle (SDV) initiative, which was established last year and now has 33 members across Tier 1 OEMs, technology and hardware providers.
This open technology platform is intended to support collaboration to save money when developing automotive-grade in-car software stacks and to accelerate time to market by using open source and open specifications developed by the SDV community.
The SDV working group aims to foster collaboration across industries for an open technology platform. It has a ‘code first’ approach, explains Sara Gallian, SDV programme manager for the Eclipse Foundation, rather than writing specifications-only first. This approach, says Gallian, is to provide governance, vendor neutrality and openness. She adds that the working group is focused on communications hardware for vehicle applications, together with tools to accelerate development and integrate these into vehicle systems.
Group members include Arm, Continental, IBM, Microsoft, NXP and Toyota. Mercedes-Benz Tech Innovation was a founding member of the Eclipse Foundation and in February 2023 announced that it was joining the SDV working group to collaborate on open source technology to create a scalable, modular, extensible and industry-read open source licensed vehicle software platform. The working group aims to implement existing code artefacts to build ecosystem components for vehicles.
In-vehicle diagnostics
One of the updates was from the Eclipse Kuksa project. Established in 2018, this project is working on developing software and ecosystems for V2X (vehicle to everything) systems. The project focuses on three areas. The first is an in-vehicle platform that will sit on top of a Linux OS (that is, Automotive Grade Linux or Apertis). The second is an automotive IoT cloud back end for functionality as well as secure, standardised access to vehicle data. A third element is an IDE, based on Eclipse Che and Visual Studio code to automate the development of in-vehicle apps.
Expanding from the initial on-board diagnostics (OBD) prototyping platform, based on a Raspberry CM3-based OBD dongle, the Kuksa Canopi is rapid prototyping hardware for software- defined vehicle applications. It is smaller than the original model and is based on the Raspberry Pi Compute Module 4. This module has a quad core Cortex A72 processor, up to 8GB of RAM and wireless lan and Bluetooth options as well as support for two USB 3.0 and two other USB ports, a real- time clock for security certificates and two independent MCP251xFD-based CAN-FD interfaces. Developers can therefore use classic CAN interfaces as well as CAN-FD buses in a vehicle. This version supports the Raspberry Pi ecosystem and includes both a SIM card and M2 slot for 4G/5G connectivity. The development board can be powered by a vehicle’s OBD port and includes the STN2120 ODB to uart interpreter IC by OBD Solutions. This provides bi-directional, half duplex communication and was also used in the earlier OBD hardware. All schematics and manufacturing files for the Kuksa Canopi are available at GitHub.
Software development kit
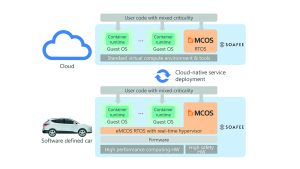
Another announcement was the eMCOS software development kit (sdk) from eSoLSDK, available now. This bundles the eMCOS Posix RTOS for parallel computing in multi or many-core platforms. There is also the eDEVS tool suite, optimised for the Posix multi-kernel architecture. It is designed to be integrated into the CI/CD toolchain (Eclipse/visual Studio code-compatible windows or Linux host support). There is also an Arm and functional safety C/C++ compiler and library, optimised for Arm hardware and probe support for the Arm DStream debugger. The kit includes middleware for transactional operations and secure TCP/IP network communication. There are also sample battery support packages for Arm platforms.
The company also released the eMCOS Hypervisor as an add-on for real-time virtualisation of mixed critical applications. There is support for Arm’s fixed virtual platforms for hardware simulation, an IPsec for network security and probe support for dedicated debuggers.
Future add-ons will be source code packages for eMCOS POSIX and eMCOS Hypervisor and ISO 26262 pre-certified licences and safety materials, adds the company.
The Eclipse Foundation
The Eclipse Foundation is a non-profit organisation where members collaborate to develop the Core-V family of Risc-V-based open sources cores, IP, software and tools and a Core-V IDE based on Eclipse Foundation members’ development tools and integrated technologies.
The OpenHW Group is also a not-for-profit organisation, working to develop Core-V open source, Risc-V processor cores, accelerators and interfaces for hardware, SoC and software ecosystems within a collaborative framework. Output is typically IP, which includes verified register transfer level code and test benches and is developed under open source licences.
The two organisations collaborate to provide a mutual hardware-software tools open source catalogue and to develop features, standards and IP with assured provenance and is accessible by the wider communities.



